

 受験生の方へ
受験生の方へ 企業・研究者の方へ
企業・研究者の方へ 在校生の方へ
在校生の方へ 市民の方へ
市民の方へ 卒業生の方へ
卒業生の方へ 学内教職員用
学内教職員用複数カメラ映像空間内でドローンを自律飛行制御する技術を開発 GPSが使えない環境で,ARマーカーを使いドローンを3次元空間制御

【研究者】
佐賀大学理工学部理工学科機械工学部門 教授 佐藤和也
*株式会社アトラックラボ(代表取締役:伊豆智幸,以下アトラックラボ)との
共同研究
【研究成果の概要】
国立大学法人佐賀大学(研究者:教授 和也佐藤)とアトラックラボは,共同でARマーカーを活用した屋内でのドローン制御を開発しました。
ドローンに搭載したARマーカーを俯瞰カメラによって認識し,ドローンの3次元位置を計測します。さらに,画角が一部分重なるように設置された複数のカメラ映像が一つの空間としてPC上に構築されるため,長い廊下や大規模倉庫など1台のカメラではカバーできない広範囲の空間における自律飛行制御を可能としました。
ARマーカーを用いた制御システムは,佐藤教授が開発,ドローンに実装しました。アトラックラボは,ドローンの自律制御や通信などを担当しました。
従来,ドローンのGPSを用いない自律飛行制御では,LiDARやステレオカメラが必要でしたが,この方式では,安価なWEBカメラなどが使用できるため,コスト面でも大きなアドバンテージがあります。
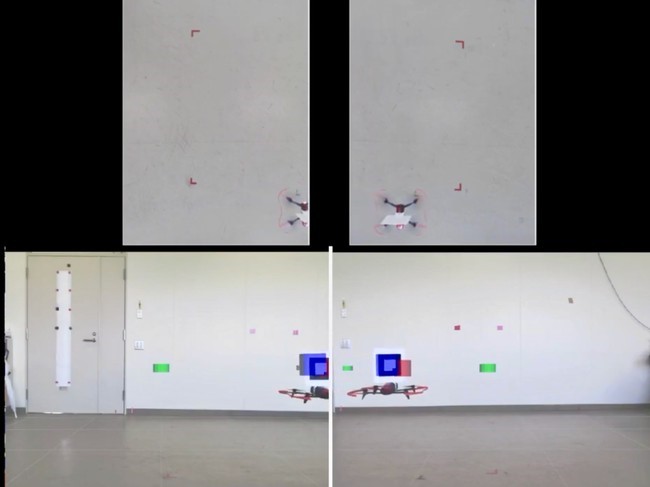
画像:下2つの画像は俯瞰カメラの映像で,自律飛行制御に用いる。上2つの画像は天井から床面に向けたカメラ映像で,自律飛行制御の確認に用いている。
実験動画へのリンク:https://youtu.be/azIq9qrW5-w
【研究成果の公表媒体(論文や学会など)】
Kenta Hidaka, Daiki Fujimoto, and Kazuya Sato:
Autonomous Adaptive Flight Control of a UAV for Practical Bridge Inspection Using Multiple-Camera Image Coupling Method,
Journal of Robotics and Mechatronics, Vol. 31, No. 6, pp. 845–854, 2019
(doi: 10.20965/jrm.2019.p0845)
【今後の展開】
今後は,ドローンだけでなく,屋内をUVを用いて消毒したり,ビニールハウスで農薬散布や収穫の援用を行う自律型ローバー(車両型ロボット)の制御など,コストの制限が大きい分野などに応用していきます。
【教員活動DBのリンク先】
http://research.dl.saga-u.ac.jp/profile/ja.2cc9cf6749e4d4f8.html
【本件に関する問い合わせ先】
佐賀大学理工学部 教授 佐藤和也
E-mail: sato@me.saga-u.ac.jp
